publications
2021
-
 Modulated Motion Blur-based Vehicle Body Velocity and Pose Estimation using an Optical Image ModulatorMinyoung Lee, Jungseok Cho, Kyung-Soo Kim, and Soohyun KimIEEE Transactions on Vehicular Technology 2021
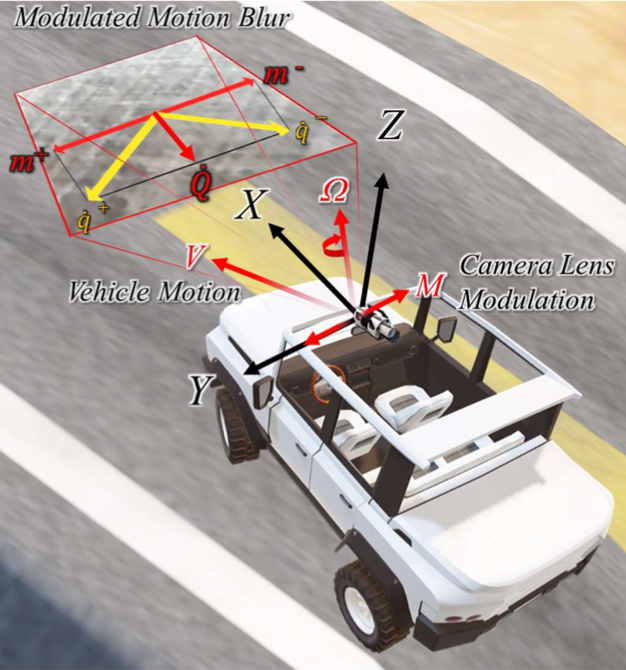
Modulated Motion Blur-based Vehicle Body Velocity and Pose Estimation using an Optical Image ModulatorMinyoung Lee, Jungseok Cho, Kyung-Soo Kim, and Soohyun KimIEEE Transactions on Vehicular Technology 2021This paper presents a new velocity and pose sensor for a ground vehicle using modulated motion blur generated from an optical image modulator (OIM). The OIM repeatedly shakes the lens of a camera in the lateral direction of the vehicle body, which creates patterns of motion blur that are recorded in an image frame. The relationship between the blur pattern and vehicle velocity is determined using camera dynamics. The 2D velocity of the vehicle body is estimated by analyzing the motion blur pattern. The vehicle roll and pitch angle with respect to the ground are calculated by comparing the estimated average depths (heights) of the sections of a scene. We propose a signal processing and control system to precisely modulate the OIM, which is an electro-mechanical system consisting of a coil, magnet, spring and damper. In addition, we validate the influence of the control reference waveform through various experiments and confirm the robustness of the proposed system. The proposed system is suitable for many applications because it is insensitive to environmental changes and has a relatively low computation time while accurately measuring the speed.
2018
-
 Vision-based Real-time Welding Line Detection Algorithms for Automatic Welding RobotJungseok ChoKAIST, master thesis 2018
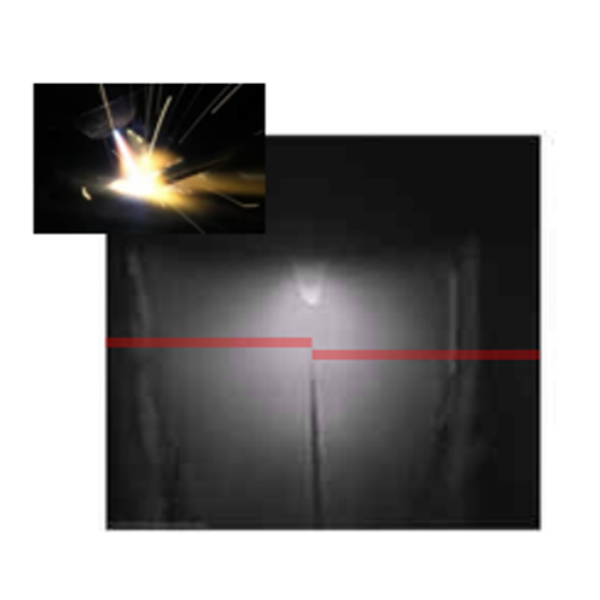
Vision-based Real-time Welding Line Detection Algorithms for Automatic Welding RobotJungseok ChoKAIST, master thesis 2018In heavy manufacturing industries, such as construction, shipbuilding, and automobile, the welding technology plays an important role in determining the quality of manufactured products. Especially in the case of the shipbuilding, steel welding accounts for a considerable portion of the overall workload. In order to improve productivity, research on automation of welding processes has been recognized as one of the important fields in industries and academia. Recently, a simple automation of the welding robot perpendicularly following the welding surface using a displacement sensor has been developed, but it still has a considerable disadvantage that it must be monitored by the user to follow the exact weld line. In addition, existing technologies to detect the weld line using computer vision have been limited to estimating the weld line in real time because the quality of the image is deteriorated due to the arc generated in the welding. To address the limitation, this study suggests an arc-insensitive optical system and a real-time processing algorithm using spectrum analysis and computer vision algorithms.
2017
-
 Development of a vehicle body velocity sensor using Modulated Motion BlurMinyoung Lee, Kyung-Soo Kim, Jungseok Cho, and Soohyun KimIEEE International Conference on Advanced Intelligent Mechatronics (AIM) 2017
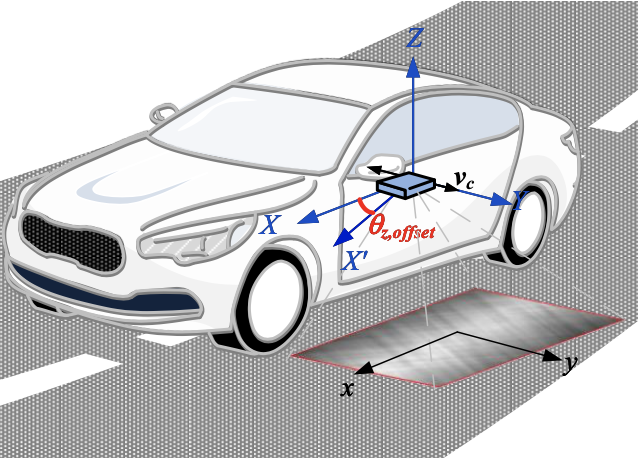
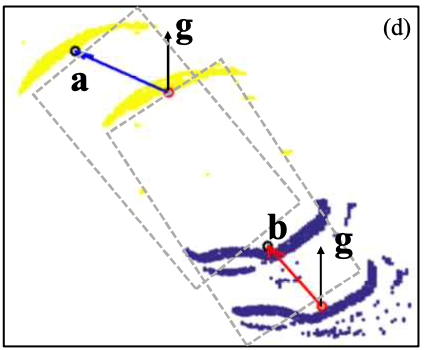
Development of a vehicle body velocity sensor using Modulated Motion BlurMinyoung Lee, Kyung-Soo Kim, Jungseok Cho, and Soohyun KimIEEE International Conference on Advanced Intelligent Mechatronics (AIM) 2017In this paper, we introduce a new sensor system to measure the vehicle body velocity using a CMOS camera and it’s motion blur. When the camera faced on the ground and mounted on the vehicle body is shaken by a specific path to artificially form a motion blur, a Modulated Motion Blur is recorded on the image sensor. This Modulated Motion Blur implies the relative motion between the camera and the ground. The relative velocity of the vehicle and the ground can be estimated by measuring the slopes of the motion blur. In this paper, the invariance of the proposed system against the rolling shutter effect is demonstrated. Then, the performance of the proposed method through various experiments is presented. The proposed method has a small amount of calculation and high accuracy. Therefore, in addition to the dynamic control of the ground vehicle, it can be applied to various fields such as precise position estimation and autonomous driving of a field robot.
2016
-
 Automatic Parking System using Background Subtraction with CCTV EnvironmentJungseok Cho, Jinrak Park, Untae Baek, Donghyun Hwang, Seibum Choi, Soohyun Kim, and Kyungsoo KimInternational Conference on Control, Automation and Systems 2016
Automatic Parking System using Background Subtraction with CCTV EnvironmentJungseok Cho, Jinrak Park, Untae Baek, Donghyun Hwang, Seibum Choi, Soohyun Kim, and Kyungsoo KimInternational Conference on Control, Automation and Systems 2016In this paper, a new automatic parking approach that uses a surveillance camera is suggested. Many parking lots have surveillance cameras. Vehicle position, attitude, and parking space detection methods using a based on CCTV environment are introduced. An entire auto parking system is realized using a small experimental vehicle. Existing auto parking systems are primarily ADAS (advanced driver assistance systems) that use extra sensors such as external cameras, ultrasonic sensors, and so on. The authors suggest an automatic parking system that does not impose an economic burden on drivers. Instead, drivers can use an automatic parking system based on CCTV environment, a central process computer, and a communication method between the computer and the driver’s car.